DPT
Overview
The DPT model was proposed in Vision Transformers for Dense Prediction by René Ranftl, Alexey Bochkovskiy, Vladlen Koltun. DPT is a model that leverages the Vision Transformer (ViT) as backbone for dense prediction tasks like semantic segmentation and depth estimation.
The abstract from the paper is the following:
We introduce dense vision transformers, an architecture that leverages vision transformers in place of convolutional networks as a backbone for dense prediction tasks. We assemble tokens from various stages of the vision transformer into image-like representations at various resolutions and progressively combine them into full-resolution predictions using a convolutional decoder. The transformer backbone processes representations at a constant and relatively high resolution and has a global receptive field at every stage. These properties allow the dense vision transformer to provide finer-grained and more globally coherent predictions when compared to fully-convolutional networks. Our experiments show that this architecture yields substantial improvements on dense prediction tasks, especially when a large amount of training data is available. For monocular depth estimation, we observe an improvement of up to 28% in relative performance when compared to a state-of-the-art fully-convolutional network. When applied to semantic segmentation, dense vision transformers set a new state of the art on ADE20K with 49.02% mIoU. We further show that the architecture can be fine-tuned on smaller datasets such as NYUv2, KITTI, and Pascal Context where it also sets the new state of the art.
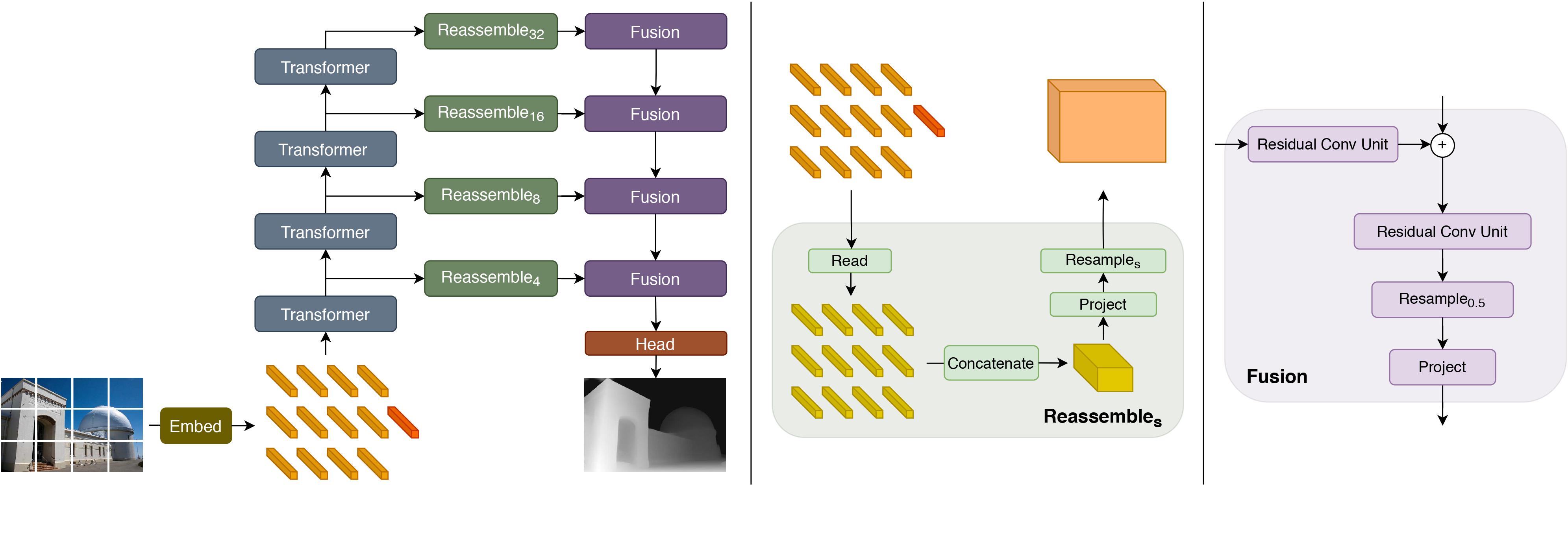 DPT architecture. Taken from the original paper.
DPT architecture. Taken from the original paper.
This model was contributed by nielsr. The original code can be found here.
Resources
A list of official Model Database and community (indicated by 🌎) resources to help you get started with DPT.
Demo notebooks for DPTForDepthEstimation can be found here.
If you’re interested in submitting a resource to be included here, please feel free to open a Pull Request and we’ll review it! The resource should ideally demonstrate something new instead of duplicating an existing resource.
DPTConfig
class transformers.DPTConfig
< source >( hidden_size = 768 num_hidden_layers = 12 num_attention_heads = 12 intermediate_size = 3072 hidden_act = 'gelu' hidden_dropout_prob = 0.0 attention_probs_dropout_prob = 0.0 initializer_range = 0.02 layer_norm_eps = 1e-12 image_size = 384 patch_size = 16 num_channels = 3 is_hybrid = False qkv_bias = True backbone_out_indices = [2, 5, 8, 11] readout_type = 'project' reassemble_factors = [4, 2, 1, 0.5] neck_hidden_sizes = [96, 192, 384, 768] fusion_hidden_size = 256 head_in_index = -1 use_batch_norm_in_fusion_residual = False use_auxiliary_head = True auxiliary_loss_weight = 0.4 semantic_loss_ignore_index = 255 semantic_classifier_dropout = 0.1 backbone_featmap_shape = [1, 1024, 24, 24] neck_ignore_stages = [0, 1] backbone_config = None **kwargs )
Parameters
-
hidden_size (
int, optional, defaults to 768) — Dimensionality of the encoder layers and the pooler layer. -
num_hidden_layers (
int, optional, defaults to 12) — Number of hidden layers in the Transformer encoder. -
num_attention_heads (
int, optional, defaults to 12) — Number of attention heads for each attention layer in the Transformer encoder. -
intermediate_size (
int, optional, defaults to 3072) — Dimensionality of the “intermediate” (i.e., feed-forward) layer in the Transformer encoder. -
hidden_act (
strorfunction, optional, defaults to"gelu") — The non-linear activation function (function or string) in the encoder and pooler. If string,"gelu","relu","selu"and"gelu_new"are supported. -
hidden_dropout_prob (
float, optional, defaults to 0.1) — The dropout probabilitiy for all fully connected layers in the embeddings, encoder, and pooler. -
attention_probs_dropout_prob (
float, optional, defaults to 0.1) — The dropout ratio for the attention probabilities. -
initializer_range (
float, optional, defaults to 0.02) — The standard deviation of the truncated_normal_initializer for initializing all weight matrices. -
layer_norm_eps (
float, optional, defaults to 1e-12) — The epsilon used by the layer normalization layers. -
image_size (
int, optional, defaults to 384) — The size (resolution) of each image. -
patch_size (
int, optional, defaults to 16) — The size (resolution) of each patch. -
num_channels (
int, optional, defaults to 3) — The number of input channels. -
qkv_bias (
bool, optional, defaults toTrue) — Whether to add a bias to the queries, keys and values. -
backbone_out_indices (
List[int], optional, defaults to[2, 5, 8, 11]) — Indices of the intermediate hidden states to use from backbone. -
readout_type (
str, optional, defaults to"project") — The readout type to use when processing the readout token (CLS token) of the intermediate hidden states of the ViT backbone. Can be one of ["ignore","add","project"].- “ignore” simply ignores the CLS token.
- “add” passes the information from the CLS token to all other tokens by adding the representations.
- “project” passes information to the other tokens by concatenating the readout to all other tokens before projecting the representation to the original feature dimension D using a linear layer followed by a GELU non-linearity.
-
is_hybrid (
bool, optional, defaults toFalse) — Whether to use a hybrid backbone. Useful in the context of loading DPT-Hybrid models. -
reassemble_factors (
List[int], optional, defaults to[4, 2, 1, 0.5]) — The up/downsampling factors of the reassemble layers. -
neck_hidden_sizes (
List[str], optional, defaults to [96, 192, 384, 768]) — The hidden sizes to project to for the feature maps of the backbone. -
fusion_hidden_size (
int, optional, defaults to 256) — The number of channels before fusion. -
head_in_index (
int, optional, defaults to -1) — The index of the features to use in the heads. -
use_batch_norm_in_fusion_residual (
bool, optional, defaults toFalse) — Whether to use batch normalization in the pre-activate residual units of the fusion blocks. -
use_auxiliary_head (
bool, optional, defaults toTrue) — Whether to use an auxiliary head during training. -
auxiliary_loss_weight (
float, optional, defaults to 0.4) — Weight of the cross-entropy loss of the auxiliary head. -
semantic_loss_ignore_index (
int, optional, defaults to 255) — The index that is ignored by the loss function of the semantic segmentation model. -
semantic_classifier_dropout (
float, optional, defaults to 0.1) — The dropout ratio for the semantic classification head. -
backbone_featmap_shape (
List[int], optional, defaults to[1, 1024, 24, 24]) — Used only for thehybridembedding type. The shape of the feature maps of the backbone. -
neck_ignore_stages (
List[int], optional, defaults to[0, 1]) — Used only for thehybridembedding type. The stages of the readout layers to ignore. -
backbone_config (
Union[Dict[str, Any], PretrainedConfig], optional) — Used only for thehybridembedding type. The configuration of the backbone in a dictionary.
This is the configuration class to store the configuration of a DPTModel. It is used to instantiate an DPT model according to the specified arguments, defining the model architecture. Instantiating a configuration with the defaults will yield a similar configuration to that of the DPT Intel/dpt-large architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
Example:
>>> from transformers import DPTModel, DPTConfig
>>> # Initializing a DPT dpt-large style configuration
>>> configuration = DPTConfig()
>>> # Initializing a model from the dpt-large style configuration
>>> model = DPTModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configSerializes this instance to a Python dictionary. Override the default to_dict(). Returns:
Dict[str, any]: Dictionary of all the attributes that make up this configuration instance,
DPTFeatureExtractor
Preprocess an image or a batch of images.
post_process_semantic_segmentation
< source >( outputs target_sizes: typing.List[typing.Tuple] = None ) → semantic_segmentation
Parameters
- outputs (DPTForSemanticSegmentation) — Raw outputs of the model.
-
target_sizes (
List[Tuple]of lengthbatch_size, optional) — List of tuples corresponding to the requested final size (height, width) of each prediction. If unset, predictions will not be resized.
Returns
semantic_segmentation
List[torch.Tensor] of length batch_size, where each item is a semantic
segmentation map of shape (height, width) corresponding to the target_sizes entry (if target_sizes is
specified). Each entry of each torch.Tensor correspond to a semantic class id.
Converts the output of DPTForSemanticSegmentation into semantic segmentation maps. Only supports PyTorch.
DPTImageProcessor
class transformers.DPTImageProcessor
< source >( do_resize: bool = True size: typing.Dict[str, int] = None resample: Resampling = <Resampling.BILINEAR: 2> keep_aspect_ratio: bool = False ensure_multiple_of: int = 1 do_rescale: bool = True rescale_factor: typing.Union[int, float] = 0.00392156862745098 do_normalize: bool = True image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None **kwargs )
Parameters
-
do_resize (
bool, optional, defaults toTrue) — Whether to resize the image’s (height, width) dimensions. Can be overidden bydo_resizeinpreprocess. -
size (
Dict[str, int]optional, defaults to{"height" -- 384, "width": 384}): Size of the image after resizing. Can be overidden bysizeinpreprocess. -
keep_aspect_ratio (
bool, optional, defaults toFalse) — IfTrue, the image is resized to the largest possible size such that the aspect ratio is preserved. Can be overidden bykeep_aspect_ratioinpreprocess. -
ensure_multiple_of (
int, optional, defaults to 1) — Ifdo_resizeisTrue, the image is resized to a size that is a multiple of this value. Can be overidden byensure_multiple_ofinpreprocess. -
resample (
PILImageResampling, optional, defaults toPILImageResampling.BILINEAR) — Defines the resampling filter to use if resizing the image. Can be overidden byresampleinpreprocess. -
do_rescale (
bool, optional, defaults toTrue) — Whether to rescale the image by the specified scalerescale_factor. Can be overidden bydo_rescaleinpreprocess. -
rescale_factor (
intorfloat, optional, defaults to1/255) — Scale factor to use if rescaling the image. Can be overidden byrescale_factorinpreprocess. -
do_normalize (
bool, optional, defaults toTrue) — Whether to normalize the image. Can be overridden by thedo_normalizeparameter in thepreprocessmethod. -
image_mean (
floatorList[float], optional, defaults toIMAGENET_STANDARD_MEAN) — Mean to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_meanparameter in thepreprocessmethod. -
image_std (
floatorList[float], optional, defaults toIMAGENET_STANDARD_STD) — Standard deviation to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_stdparameter in thepreprocessmethod.
Constructs a DPT image processor.
preprocess
< source >( images: typing.Union[ForwardRef('PIL.Image.Image'), numpy.ndarray, ForwardRef('torch.Tensor'), typing.List[ForwardRef('PIL.Image.Image')], typing.List[numpy.ndarray], typing.List[ForwardRef('torch.Tensor')]] do_resize: bool = None size: int = None keep_aspect_ratio: bool = None ensure_multiple_of: int = None resample: Resampling = None do_rescale: bool = None rescale_factor: float = None do_normalize: bool = None image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None return_tensors: typing.Union[str, transformers.utils.generic.TensorType, NoneType] = None data_format: ChannelDimension = <ChannelDimension.FIRST: 'channels_first'> input_data_format: typing.Union[str, transformers.image_utils.ChannelDimension, NoneType] = None **kwargs )
Parameters
-
images (
ImageInput) — Image to preprocess. Expects a single or batch of images with pixel values ranging from 0 to 255. If passing in images with pixel values between 0 and 1, setdo_rescale=False. -
do_resize (
bool, optional, defaults toself.do_resize) — Whether to resize the image. -
size (
Dict[str, int], optional, defaults toself.size) — Size of the image after reszing. Ifkeep_aspect_ratioisTrue, the image is resized to the largest possible size such that the aspect ratio is preserved. Ifensure_multiple_ofis set, the image is resized to a size that is a multiple of this value. -
keep_aspect_ratio (
bool, optional, defaults toself.keep_aspect_ratio) — Whether to keep the aspect ratio of the image. If False, the image will be resized to (size, size). If True, the image will be resized to keep the aspect ratio and the size will be the maximum possible. -
ensure_multiple_of (
int, optional, defaults toself.ensure_multiple_of) — Ensure that the image size is a multiple of this value. -
resample (
int, optional, defaults toself.resample) — Resampling filter to use if resizing the image. This can be one of the enumPILImageResampling, Only has an effect ifdo_resizeis set toTrue. -
do_rescale (
bool, optional, defaults toself.do_rescale) — Whether to rescale the image values between [0 - 1]. -
rescale_factor (
float, optional, defaults toself.rescale_factor) — Rescale factor to rescale the image by ifdo_rescaleis set toTrue. -
do_normalize (
bool, optional, defaults toself.do_normalize) — Whether to normalize the image. -
image_mean (
floatorList[float], optional, defaults toself.image_mean) — Image mean. -
image_std (
floatorList[float], optional, defaults toself.image_std) — Image standard deviation. -
return_tensors (
strorTensorType, optional) — The type of tensors to return. Can be one of:- Unset: Return a list of
np.ndarray. TensorType.TENSORFLOWor'tf': Return a batch of typetf.Tensor.TensorType.PYTORCHor'pt': Return a batch of typetorch.Tensor.TensorType.NUMPYor'np': Return a batch of typenp.ndarray.TensorType.JAXor'jax': Return a batch of typejax.numpy.ndarray.
- Unset: Return a list of
-
data_format (
ChannelDimensionorstr, optional, defaults toChannelDimension.FIRST) — The channel dimension format for the output image. Can be one of:ChannelDimension.FIRST: image in (num_channels, height, width) format.ChannelDimension.LAST: image in (height, width, num_channels) format.
-
input_data_format (
ChannelDimensionorstr, optional) — The channel dimension format for the input image. If unset, the channel dimension format is inferred from the input image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format."none"orChannelDimension.NONE: image in (height, width) format.
Preprocess an image or batch of images.
post_process_semantic_segmentation
< source >( outputs target_sizes: typing.List[typing.Tuple] = None ) → semantic_segmentation
Parameters
- outputs (DPTForSemanticSegmentation) — Raw outputs of the model.
-
target_sizes (
List[Tuple]of lengthbatch_size, optional) — List of tuples corresponding to the requested final size (height, width) of each prediction. If unset, predictions will not be resized.
Returns
semantic_segmentation
List[torch.Tensor] of length batch_size, where each item is a semantic
segmentation map of shape (height, width) corresponding to the target_sizes entry (if target_sizes is
specified). Each entry of each torch.Tensor correspond to a semantic class id.
Converts the output of DPTForSemanticSegmentation into semantic segmentation maps. Only supports PyTorch.
DPTModel
class transformers.DPTModel
< source >( config add_pooling_layer = True )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
The bare DPT Model transformer outputting raw hidden-states without any specific head on top. This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >(
pixel_values: FloatTensor
head_mask: typing.Optional[torch.FloatTensor] = None
output_attentions: typing.Optional[bool] = None
output_hidden_states: typing.Optional[bool] = None
return_dict: typing.Optional[bool] = None
)
→
transformers.models.dpt.modeling_dpt.BaseModelOutputWithPoolingAndIntermediateActivations or tuple(torch.FloatTensor)
Parameters
-
pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See DPTImageProcessor.call() for details. -
head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
-
output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. -
output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. -
return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple.
Returns
transformers.models.dpt.modeling_dpt.BaseModelOutputWithPoolingAndIntermediateActivations or tuple(torch.FloatTensor)
A transformers.models.dpt.modeling_dpt.BaseModelOutputWithPoolingAndIntermediateActivations or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (DPTConfig) and inputs.
-
last_hidden_state (
torch.FloatTensorof shape(batch_size, sequence_length, hidden_size)) — Sequence of hidden-states at the output of the last layer of the model. -
pooler_output (
torch.FloatTensorof shape(batch_size, hidden_size)) — Last layer hidden-state of the first token of the sequence (classification token) after further processing through the layers used for the auxiliary pretraining task. E.g. for BERT-family of models, this returns the classification token after processing through a linear layer and a tanh activation function. The linear layer weights are trained from the next sentence prediction (classification) objective during pretraining. -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the optional initial embedding outputs.
-
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
-
intermediate_activations (
tuple(torch.FloatTensor), optional) — Intermediate activations that can be used to compute hidden states of the model at various layers.
The DPTModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, DPTModel
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("Intel/dpt-large")
>>> model = DPTModel.from_pretrained("Intel/dpt-large")
>>> inputs = image_processor(image, return_tensors="pt")
>>> with torch.no_grad():
... outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 577, 1024]DPTForDepthEstimation
class transformers.DPTForDepthEstimation
< source >( config )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
DPT Model with a depth estimation head on top (consisting of 3 convolutional layers) e.g. for KITTI, NYUv2.
This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >(
pixel_values: FloatTensor
head_mask: typing.Optional[torch.FloatTensor] = None
labels: typing.Optional[torch.LongTensor] = None
output_attentions: typing.Optional[bool] = None
output_hidden_states: typing.Optional[bool] = None
return_dict: typing.Optional[bool] = None
)
→
transformers.modeling_outputs.DepthEstimatorOutput or tuple(torch.FloatTensor)
Parameters
-
pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See DPTImageProcessor.call() for details. -
head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
-
output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. -
output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. -
return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. -
labels (
torch.LongTensorof shape(batch_size, height, width), optional) — Ground truth depth estimation maps for computing the loss.
Returns
transformers.modeling_outputs.DepthEstimatorOutput or tuple(torch.FloatTensor)
A transformers.modeling_outputs.DepthEstimatorOutput or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (DPTConfig) and inputs.
-
loss (
torch.FloatTensorof shape(1,), optional, returned whenlabelsis provided) — Classification (or regression if config.num_labels==1) loss. -
predicted_depth (
torch.FloatTensorof shape(batch_size, height, width)) — Predicted depth for each pixel. -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each layer) of shape(batch_size, num_channels, height, width).Hidden-states of the model at the output of each layer plus the optional initial embedding outputs.
-
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, patch_size, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The DPTForDepthEstimation forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Examples:
>>> from transformers import AutoImageProcessor, DPTForDepthEstimation
>>> import torch
>>> import numpy as np
>>> from PIL import Image
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("Intel/dpt-large")
>>> model = DPTForDepthEstimation.from_pretrained("Intel/dpt-large")
>>> # prepare image for the model
>>> inputs = image_processor(images=image, return_tensors="pt")
>>> with torch.no_grad():
... outputs = model(**inputs)
... predicted_depth = outputs.predicted_depth
>>> # interpolate to original size
>>> prediction = torch.nn.functional.interpolate(
... predicted_depth.unsqueeze(1),
... size=image.size[::-1],
... mode="bicubic",
... align_corners=False,
... )
>>> # visualize the prediction
>>> output = prediction.squeeze().cpu().numpy()
>>> formatted = (output * 255 / np.max(output)).astype("uint8")
>>> depth = Image.fromarray(formatted)DPTForSemanticSegmentation
class transformers.DPTForSemanticSegmentation
< source >( config )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
DPT Model with a semantic segmentation head on top e.g. for ADE20k, CityScapes.
This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >(
pixel_values: typing.Optional[torch.FloatTensor] = None
head_mask: typing.Optional[torch.FloatTensor] = None
labels: typing.Optional[torch.LongTensor] = None
output_attentions: typing.Optional[bool] = None
output_hidden_states: typing.Optional[bool] = None
return_dict: typing.Optional[bool] = None
)
→
transformers.modeling_outputs.SemanticSegmenterOutput or tuple(torch.FloatTensor)
Parameters
-
pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See DPTImageProcessor.call() for details. -
head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
-
output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. -
output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. -
return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. -
labels (
torch.LongTensorof shape(batch_size, height, width), optional) — Ground truth semantic segmentation maps for computing the loss. Indices should be in[0, ..., config.num_labels - 1]. Ifconfig.num_labels > 1, a classification loss is computed (Cross-Entropy).
Returns
transformers.modeling_outputs.SemanticSegmenterOutput or tuple(torch.FloatTensor)
A transformers.modeling_outputs.SemanticSegmenterOutput or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (DPTConfig) and inputs.
-
loss (
torch.FloatTensorof shape(1,), optional, returned whenlabelsis provided) — Classification (or regression if config.num_labels==1) loss. -
logits (
torch.FloatTensorof shape(batch_size, config.num_labels, logits_height, logits_width)) — Classification scores for each pixel.The logits returned do not necessarily have the same size as the
pixel_valuespassed as inputs. This is to avoid doing two interpolations and lose some quality when a user needs to resize the logits to the original image size as post-processing. You should always check your logits shape and resize as needed. -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each layer) of shape(batch_size, patch_size, hidden_size).Hidden-states of the model at the output of each layer plus the optional initial embedding outputs.
-
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, patch_size, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The DPTForSemanticSegmentation forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Examples:
>>> from transformers import AutoImageProcessor, DPTForSemanticSegmentation
>>> from PIL import Image
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("Intel/dpt-large-ade")
>>> model = DPTForSemanticSegmentation.from_pretrained("Intel/dpt-large-ade")
>>> inputs = image_processor(images=image, return_tensors="pt")
>>> outputs = model(**inputs)
>>> logits = outputs.logits